Як Simucube, але своє – будуємо активну педаль гальма
Десь пів року тому, натрапив на відео, пости та тему будування активної педалі гальма для симрейсингу. Результати людей, які долучились до цього проекту, були гарні, як за технічним дизайном виробу, так і за проацездатністю педалі.
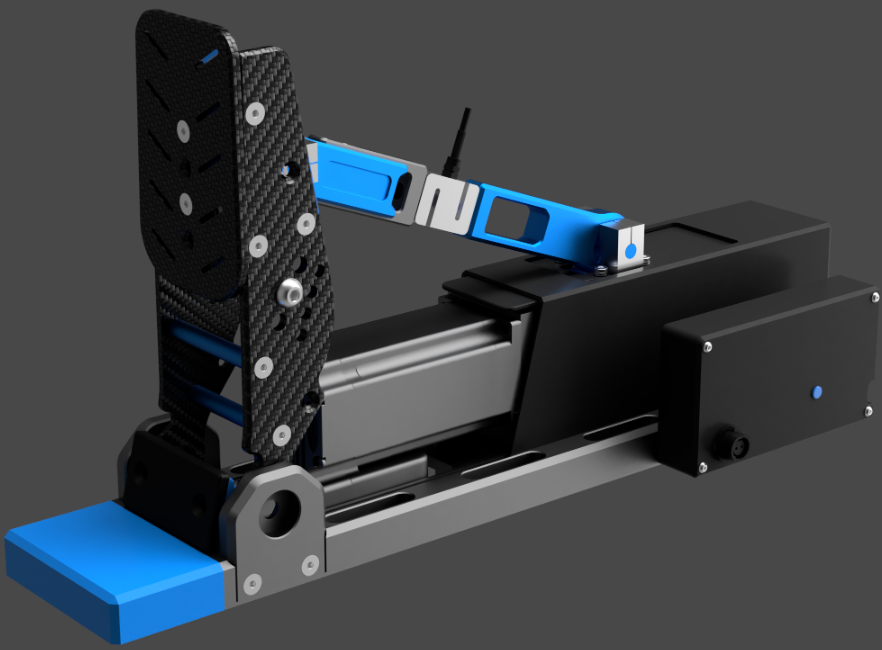
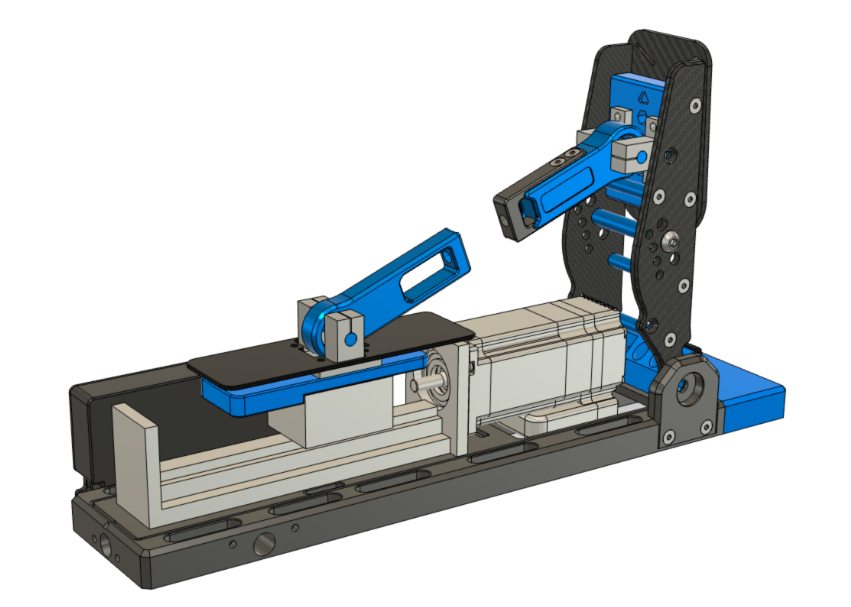
Принцип роботи активної педалі полягає в дуже простій схемі взаїмодії між:
- датчиком стиснення (тензодатчик, як у вагах, при стисканні зовнішнього матеріалу якого, вбудований в нього датчик реєструє ступінь деформації і перетворює його в сигнал)
- серво-двигуном (який обертає черв’ячну направляючу і, таким чином, рухає її каретку)
- чер’ячною направляючою (до якої кріпиться тяга педалі, що і рухає саму педаль)
- платою електроніки (контроллером, що перетворює сигнал від тензодатчика в зусилля натискання, зберігає в собі параметри довжини ходу педалі, її геометрії та інших налаштованих параметрів роботи, керує роботою серво-двигуна та обмінюється даними з ПК через інтерфейс підключення)
В реальному житті все це вигладає наступним чином: ми налаштовуємо під себе довжину ходу педалі, її супротив натисканню (наскількі вона легка чи важка), криву ходу (чи вона лінійна, чи, наприклад, легка спочатку та більш важка наприкінці ходу), переднавантаження (наскільки ми маємо продавити педаль, щоб вона почала реєструвати рух), максимальну силу натиску в кг (скільки маємо прикласти зусілля щоб повністю витиснути педаль), та додаткові еффекти по типу частоти та амплітуди вібрації при спрацюванні АБС, тощо.
Починаємо тиснути на педаль. Тензодатчик реєструє з яким зусиллям ми це робимо та контроллер починає обертати двигун (рухати педаль зі швидкістю, відповідною для цього зусилля та рештою встановлених параметрів (переднавантаження, крива, супротив)). Педаль рухається в межах заданої довжини ходу, наприкінці відтворюючі максимальне зусилля в кг, яке ми встановили. Після цього двигун тримає позицію, поки ми не почнемо відпускати педаль. Тоді двигун починає обертатися в зворотньому напрямку, відповідно до швидкості відпускання педалі ногою, чи максимально швидко, якщо ми знімаємо ногу відразу. Решта ефектів типу АБС, зриву, двигуна, чи дорожнього покриття – це окремі слої, які накладаються за рахунок додаткових коротких та швидких обертань двигуна/рухів, які відчуваються як вібрації (можуть бути дуже сильними в порівнянні з хаптіками), чи як прискорення/уповільнення/додатковий супортив руху педалі у разі імітування G-сил.
А отже, вся перевага активної педалі полягає в тому, що:
- можна змінити її хід та супротив натисканню, плюс криву ходу, мертву зону та переднавантаження просто поклікав мишкою
- можна генерувати різні ефекти типу АБС, G-сили, дорожнє покриття, зрив коліс, тощо, без використання додаткових засобів типу хаптік-моторів, басс-шейкерів
- можна налаштовувати максимальне навантаження при гальмуванні
- можна генерувати безліч профілів та підкидати їх для різних авто/симуляторів (наприклад, щоб стрибнути в LMU з GT3 на LMP зі зниженим лімітом по гальму, щоб не блокувати колеса)
і все це робиться через всім відомий Simhub, за зручною логікою, дуже швидко.
В порівнянні із будь-якими механічними педалями, у активної є велика перевага в швидкості переналаштування під різні машини та симулятори (не болти та демфери, а просто зміна профілю налаштувань в софті), в генеруванні більшої кількості ефектів порівняно з додатковими хаптік-двигунами зворотнього зв’язку (якщо вони взагалі є), в більшому діапазоні налаштувань з точки зору демфери vs налаштування серво-двигуна, та в відтворюваності (стабільності/постійності) гальмування за рахунок роботи двигуна, а не гумових демферів, які змінюють свої характеристики з часом, або в різних температурних умовах.
В поточний час, на ринку існує всього два комерційних продукта: це активні педалі від Simucube та Moza. Перші коштують порядка 2,000Євро за педаль, а mBoost від Moza в магазині de2ua 49,000грн на час написання цієї статті. Тобто – дорого. Дуже дорого. Самостійна збірка на базі зазначеного проекту виходить десь 18,000-20,000грн, це із залишками кріплень і інших дрібних елементів.
Якщо ви не відчуваєте себе спроможним та досить натхненним на такі справи як замовлення з різних місць, очікування, збірка механіки, пайка, прошивка та налаштування – кращє не беріться. Можете просто втратити зазначену суму грошей. Придбайте мозівську педіль у de2ua та радійте.

Simucube були перші. Це вони запропонували ринку перші активні педалі для симрейсингу та зробили комерційну версію. Ціна, за час їх існування, практично не змінювалась. І, наскільки я зрозумів, саме Simucube, після того як інші гравці заявили про вихід їх майбутніх активних педалей (Moza, Simagic), вирішив відкрити деякі додаткові технічні підробиці з мехініки та електроніки публіці, з метою подивитися до чього прийдуть ентузиасти симрейсингу і які зміни та новітні підходи запропонують. Так і з’явився проект на GitHub, з лімітованою, некомерційною ліцензією на використання промислового дизайну та механіки (можливо, деяких принципів логіки в електроніці).
Сам проект надає необхідну інформацію з:
- будування механіки педалі
- будування електроніки під педаль + прошивки
- налаштування та підключення до Simhub (+ бібліотеку плагіна)
Але, окрім будування з нуля, є можливість замовити вже презібрані основні частини механіки, вироблені на ЧПУ з алюмінію та карбону (що я і зробив), що суттєво полегшує весь проект та робить виріб набагато ближче до його комерційного старшого брата за якістю відтворення. Інформація про замовлення є доступною в Discord гілці проекту DIY FFB Pedal. Займається цим Франческо Фіоріні, власник компанії SimDesign (не тільки це, в них ще є доволі цікаві рулі та баттнбокси)

Пластикові елементи друкував в Києві, у знайомого. Їх креслення доступні на сторінці Франческо.
По платах електроніки, можна побудувати свої за проектом Gilphilbert, чи теж замовити через Франческо (що я і зробив).
Решта запчастин та елементів, які необхідні для збірки педалі, перелічені на сторінці Франческо (якщо будувате саме по його розробці). Також, він надає інструкції по збірці та деяких налаштуваннях, разом з кінематикою педалі, яку потрібно завантажувати у Simhub для відтворення механічних можливостей.
Моя педаль побудована на:
- Двигун iSV57T-130S
- Направляюча JKK60-5-P-150-A1-F4
- З’єднувач з Алі 8 to 8mm
- Карбон та алюміній + пластикова підставка під ногу від Франческо
- Електроніка Gilphilbert
- Блок живлення 32В 5А
- Тензодатчик на 200кг з Алі
- Решта болтів, гайок, контактів, дротів – з Алі та з Arduino.UA
- Пластикові деталі – локальні принти
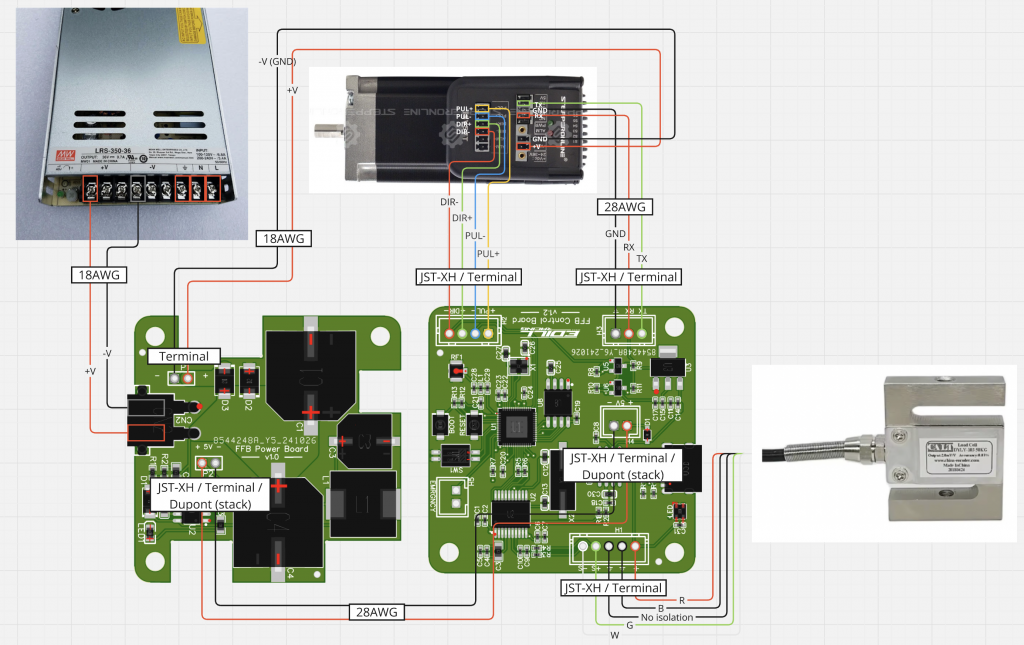
По всьому переліченому в BOM (bill of materials) для проекту на сторінці Франческо та схеми підключення тензодатчика, хочу додати декілька зауважень:
- coupler (з’єднувач між двигуном та черв’ячною направляючою) краще замовляти разом з направляючою JKK (там є така опція при замовленні). З’єднувач з Алі не пройде крізь отвір направляючої через великі шляпки гвинтів затискання без додаткової обробки
- 4 болти кріплення направляючої через проставку з пластику та базу мають бути не 30мм М5, а 35мм М5 (не вистачить довжини).
- білий та зелений дроти тензодатчику мають бути навпаки від зазначеного на схемі підключення на сторінці GilphilBert (інакше педаль буде працювати в зворотньому напрямку)
- усі діп-свічі на двигуні мають бути в положені ВИМКНЕНО
- плату GilphilBert потрібно прошити ДО всього іншого. Тобто – отримали, прошили, а потім вже паяєте, підключаєте…
- пластиковий захист від пилу може бути довший ніж потрібно, це буде залежати від того, який хід педалі ви хочете виставити. Тобто, захистну кришку кращє встановити після повного налаштування роботи педалі під вас, та адаптувати залежно від цього.
- при першому ідключенні до ПК та Simhub (по USB) – логів не має бути. Потрібно нажати “підключитись”, а потім “відправити конф. на педалі” і подивитися в логи. Пройде успішно, якщо усе ок. Після цього можна заливати файл конфігурації, яку надає Франческо, чи можу надати я.
- Якщо нажати кнопку “від’єднатися від педалі” та потім знов під’єднатися – ком порт педалі змінится на наступний за номером. Так підключати не можна, це ком порт дебагера, якій автоматично включається замість звичайного у другому циклі. Для того, щоб під’єднатися до педалі знов – потрібно від’єднати педаль від ПК та вимкнути/увімкнути її.
Єдина незручність в проєкті електроніки Gilphilbert – це, саме, підключення до ПК по USB: педаль має спочатку повністю пройти процес ініціалізації після включення (перевірка ходу), а тільки потім, коли загоряється зелений діод на платі – можна підключати її до ПК. В інакшому випадку, ком порт може просто зависнути. Але і ця незручність має рішення:
- як вирішити проблему відключення педалі від мережі: просто ставимо кнопку на дріт блока живлення, чи використовуємо подовжувач з кнопкою
- як вирішити проблему початкової ініціалізації і підключення після цього: існують пристрої типу KVM перемикача USB портів. Тобто, нам потрібно зробити так, щоб кнопкою під’єднувати кабель USB до ПК коли педаль вже включилась. Ось, у мене такий.
- і тільки після цього запускаємо Simhub, в якому стоять галки на авто-під’єднання до педалі та авто-зчитування поточної конфігурації.
Сам процес збірки та початкових налаштувань нескладний. Я витратив 1 день. Найважче, як завжди, спочатку зрозуміти що та куди, а потім підготувати та припаяти кабелі. В результаті успішної збірки, при підключенні до блока живлення, педаль має ожити, посунутись назад та вперед до максимальної точки і зупинитись в ній. При натисканні має рухатись, при відтягуванні – стояти на місці. Якщо все так – можна підключати до ПК. Щє раз повторюю, що саме налаштування педалі та її кінематики це просто завантажити конф. файл який надає Франческо. Після цього залишається тільки доналаштовувати під себе, за потреби.
Педаль по довжині, без підставки під ногу, десь 42см. Маєте це враховувати. Не кожне місце та ріг зможуть її розмістити. В більшості випадків ріг має бути посунутий назад від стіни на 20-30см порівняно зі звичайними педалями.
Поки усе. Якщо будуть питання – звертайтесь (iryxbro собака gmail.com) – допоможу.