

FrSKY XMPF3E or XSRF3E — полетные контроллеры F3Evo со встроенными приемниками

Последнее время гоночные и акробатические ФПВ коптеры стали очень популярны, особенно небольших размеров. Во всем мире проводится много событий для популяризации этого спорта и хобби; на рынке ощущается конкуренция продуктов; много новых пилотов приходит именно в этот сегмент. И, если год назад мы все еще гадали какой сетап для коптера выбрать, то сейчас наметились явные программно-аппаратные стандарты — рамы размера 180-250, полетные контроллеры F3|F4, аппаратуры управления и приемники FrSKY, прошивки CleanFlight|BetaFlight. Это приводит к тому, что разные производители начинают предлагать продукты типа все-в-одном, делая полнофункциональные бутерброды из электроники для удобства сборки и сохранения небольшого веса.

FrSKY не исключение. Эта компания запрыгивает в паровоз, выводя на рынок несколько новых продуктов о которых пойдет речь — полетные контроллеры SpRacing F3Evo со встроенными приемниками XM+ или XSR:
- FrSKY XMPF3E (F3Evo со встроенным XM+, без телеметрии, только RSSI через F3Evo, цена $35)
- FrSKY XSRF3E (F3Evo со встроенным XSR, полная телеметрия, цена $42)
Длинные имена названия продукта состоят из сокращений двух названий: SpRacing F3Evo и XM+ или XSR приемника.


Что хорошего в этих платах? Кроме того, что приемники уже на плате, сами платы F3Evo, фактически, не потеряли из-за этого своей отличной функциональности. Конечно, SpRacing F3Evo и XSRF3E или XMPF3E не полностью повторяют друг-друга с точки зрения портов ввода-вывода и расположения элементов. Но, в любом случае, две последних дают все возможности для построения максимально функциональных и современных сетапов.
Технические характеристики XMPF3E:
- 36×36×6мм, с установочными 30.5мм
- STM32F303 CPU (72Mhz inc FPU), MPU9250 (accelerometer/gyro/compass), BMP280 barometer, CC2510 CPU для приемника XM+
- 16CH (8-ой канал выводит RSSI) через SBUS на UART2 Rx F3EVO
- Входящее напряжение: 4.0~10В
- Ток потребления: 100мА@5В
- Поддерживает: FrSky Taranis X9D/X9E/ Horus X12S/XJT в режиме D16
- Вес: 7г
- 6 выходов PWM из F3Evo
- Отдельный SBUS выход приемника XM+ (обновление прошивки и каналы)
- Карта microSD для Blackbox на борту
- CleanFilght|BetaFlight ready (с завода залит Betaflight)
- Можно подключить гоночный транспондер
Технические характеристики XSRF3E:
- Полная телеметрия на аппаратуру через/от UART3 F3Evo
- 36×36×6мм, с установочными 30.5мм
- STM32F303 CPU (72Mhz inc FPU), MPU9250 (accelerometer/gyro/compass), BMP280 barometer
- 16CH (8-ой канал выводит RSSI) через SBUS на UART2 Rx F3EVO
- Входящее напряжение: 4.0~10В
- Ток потребления: 200mA@5V
- Поддерживает: FrSky Taranis X9D/X9E/ Horus X12S/XJT в режиме D16
- Весt: 6г
- 6 выходов PWM из F3Evo
- Отдельный SPort выход приемника XSR (обновление прошивки + телеметрия)
- CleanFilght|BetaFlight ready (с завода залит Betaflight)
- PIDы полетного контроллера можно настраивать по воздуху (OTA) через канал телеметрии
- Можно подключить гоночный транспондер
Купить FrSKY XSRF3E можно здесь
основные отличия плат выделены жирным.
Как видно из технических характеристик основные отличия между плат в том, что XSRF3E поддерживает полную телеметрию + OTA конфигурацию. В XMPF3E телеметрии нет, но есть встроенная карта памяти и blackbox для логов. Тяжело выбрать…. Иметь телеметрию и купить отдельный blackbox или иметь blackbox и купить OSD? Решать вам!

В коробке:
XMPF3E поставляется с короткой инструкцией по эксплуатации, 5-тью наборами пинов JST-SH, одним коннектором JST-SH с 6-тью кабелями PWM выходов и картой памяти microSD на 1GB для записи логов.
XSRF3E идет в идентичном комплекте, только без карты памяти, из-за отсутствия слота.
Функциональность:
Смотрим на схему XMPF3E, которая полностью описывает возможности полетного контроллера:


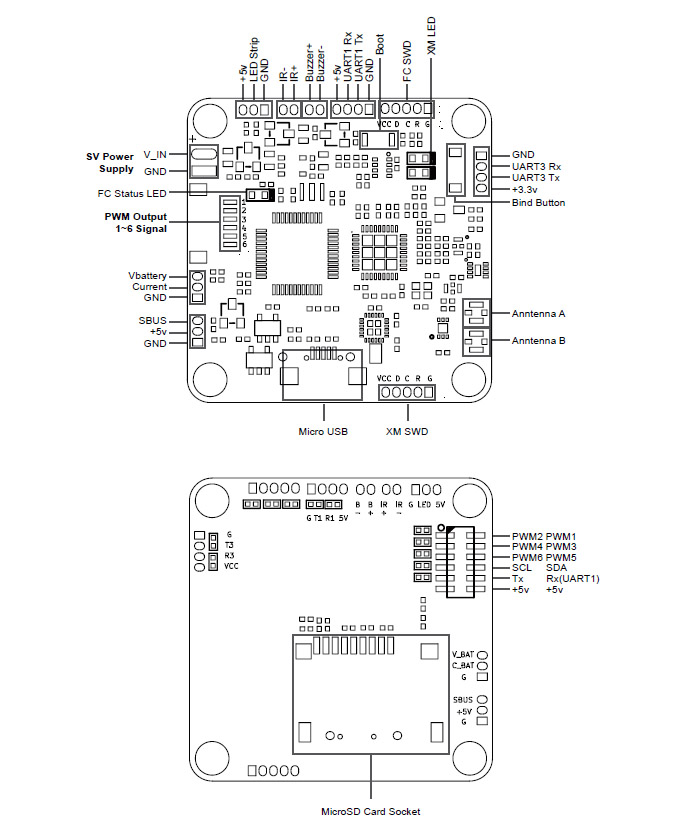
Кроме наличия на плате всех последних гироскопов, акселерометров, компасов, барометров и blackbox, есть еще и дополнительные порты:
- для LED лент
- для пищалки
- для гоночного транспондера
- для OSD
- для мониторинга напряжения и потребления полетного аккумулятора
и дополнительные неиспользованные порты ввода-вывода:
- UART3
- UART1
- выход SBUS XM+ (каналы + обновление)
То есть, имея все это на вооружении и подключив сюда еще OSD, транспондер, пищалку и LEDы — Вы получаете отличный набор функций — все, что необходимо на текущий момент.
У XSRF3E немного другая схема:


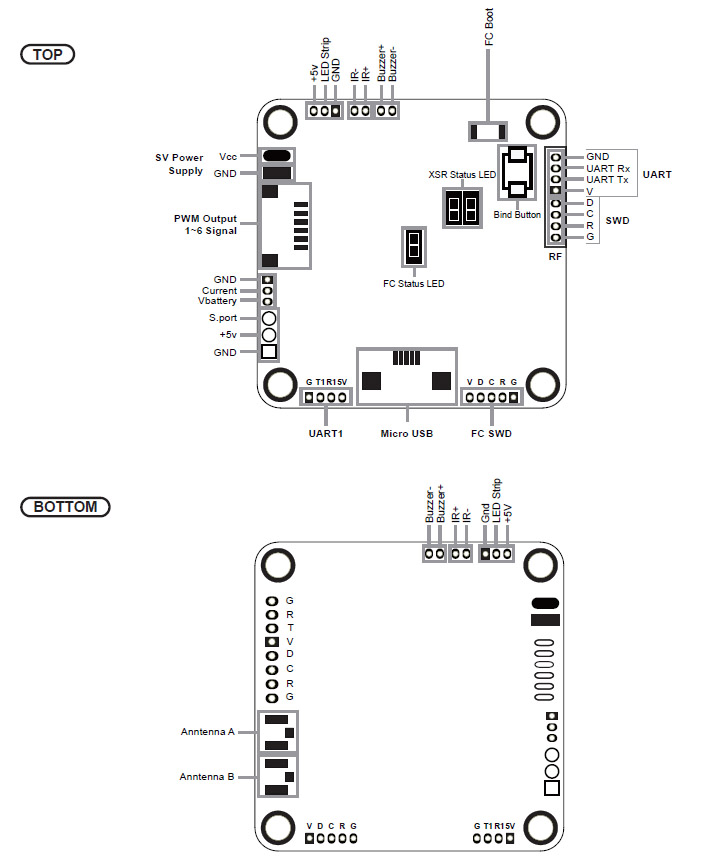
Здесь тоже есть все последние гироскопы, акселерометры, компасы и барометры, но нет blackbox. Дополнительные порты:
- для LED лент
- для пищалки
- для гоночного транспондера
- для OSD
- для мониторинга напряжения и потребления полетного аккумулятора
и дополнительные неиспользованные порты ввода-вывода:
- UART1
- выход SPort XSR (телеметрия + обновление)
То есть, имея все ЭТО на вооружении и подключив сюда еще и внешний транспондер, пищалку, LEDы и внешний blackbox — Вы опять получаете отличный набор функций — все, что необходимо на текущий момент. Более того, вы сможете удаленно настраивать PIDы своего полетника… Но самое важное — наличие SPort телеметрии от F3Evo на аппаратуре управления. Какие значения? Все написано ЗДЕСЬ. Возможно, это надо еще проверить, Вы даже сможете подключить внешние SPort сенсоры к пинам SPort на плате…
Сделал схему подключения:
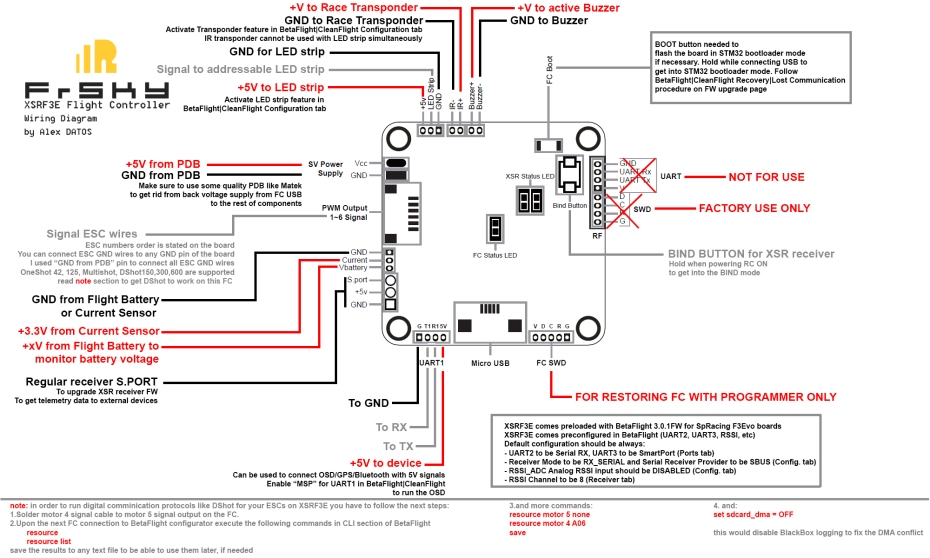
Еще интересно то, что пины выводы SPort с приемника на плате имеют стандартный размер серво-кабеля. А вот выводы SBUS на XMPF3E — нестандартные, а меньше.
Стандартный вопрос — куда паять землю от регуляторов… Собрать в пучок и припаять к любому контакту земли на полетнике. Я паяю к земле входящего от платы питания контакту.
Специфика настройки прошивок (CleanFlight и BetaFlight):
Сначала, желательно, привязать приемник к аппаратуре. Тут все стандартно. На обеих платах есть кнопка BIND и красный/зеленый светодиоды, как и на всех других приемниках FrSKY. Зажали кнопку, подали питание, включили BIND в аппаратуре в режиме D16; смена мигания диодами произошла — все отключили и включили опять. Все. Теперь можно подключаться через GUI CleanFlight | BetaFlight (эти GUI являются программами для Chrome и их можно скачать в магазине Chrome) к плате по microUSB.
Для платы XMPF3E обязательны следующие настройки:
- UART2 должен быть настроен как Serial RX
- Receiver mode должен быть RX_Serial
- Serial Receiver Provider должен быть SBUS
- RSSI_ADC Analog RSSI Input должен быть выключен
- Канал RSSI должен быть указан как 8-ой
Для платы XSRF3E обязательны следующие настройки:
- UART2 должен быть настроен как Serial RX
- UART3 должен быть SmartPort
- Receiver mode должен быть RX_Serial
- Serial Receiver Provider должен быть SBUS
- RSSI_ADC Analog RSSI Input должен быть выключен
- Канал RSSI должен быть указан как 8-ой (или отключен, RSSI все равно будет отдаваться на аппаратуру от приемника без участия платы)
Основное отличие в том, что UART3 на XSRF3E будет занят телеметрией от приемника XSR. Зато, как помним, есть большое преимущество — удаленная настройка PIDов. Для этого нам понадобится иметь прошивку BetaFlight 3.1 на полетнике, OpenTX 2.2 с Lua на аппаратуре, этот скрипт на карте памяти, в папке SCRIPTS/TELEMETRY (имя файла не длиннее 6-ти символов) и указания этого скрипта как одного из экранов телеметрии в настройках модель/телеметрия. Если так не получилось — скопируйте скрипт в папку SCRIPTS, зайдите в SD Card менеджер и запустите скрипт оттуда. Все работает, проверено.
 photo source — flymod.net
photo source — flymod.net
Телеметрия XSRF3E:
Следующие данные возвращаются на аппаратуру (частично взято отсюда):
- RSSI — возвращается на аппаратуру, похоже, независимо от платы F3Evo. Даже если в ней отключить RSSI — показатель все равно есть на аппаратуре.
- A4 : среднее напряжение на банке: (общее напряжение аккумулятора) / (кол-во банок)
- Alt : высота по барометру — 0 при взлете.
- Vspd : вертикальная скорость, cm/s.
- Hdg : направление, Север 0°, Юг 180°.
- AccX,Y,Z : данные акселлерометров.
- Tmp1 : полетный режим 4-мя цифрами. 1234. Игнорировать первую 1: 1 это GPS Hold, 2 это GPS Home, 4 это Headfree, 1 это mag вкл, 2 это baro вкл, 4 это sonar вкл, 1 это angle, 2 это horizon, 4 это passthrough, 1 это ok to arm, 2 это arming is prevented, 4 это armed
- Tmp2 (только при наличии GPS) : GPS lock status, цифрами 1234,: 1 это GPS Fix, 2 это GPS Home fix, кол-во спутников
- VFAS : напряжение батареи.
- GAlt : GPS высота, над уровнем моря.
- GSpd : скорость по GPS.
- GPS : GPS кординаты.
Cels : average cell value, vbat divided by cell number. Didn’t find this. Seems to be Vfas or A4.- RxBAT : напряжение на F3E
- Curr : ток потребления если подключен сенсор, mA
- Fuel : что-то передается, но пока не понял, что
Настройки полетника:
Я не буду описывать этот пункт. Все настройки полетного контроллера производятся как и в любой другой плате работающей на прошивке CleanFlight | BetaFlight. Лучше обратиться к документации прошивки или к документации по SpRacing. К тому же, я еще сам не летал на данной плате — жду пока приедут новые рамы KDS Kylin 210 чтобы начать сборку.
Обновления прошивок приемников на платах XSRF3Eи XMPF3E:
Как обычно, встроенные приемники будут иметь версии прошивок FCC или EU LBT. Если Вы купили неподходящую версию — не беда — приемники можно перепрошить.
В случае XSRF3E, все просто — у Вас есть SPort (SPort, +5, G), место под пины на плате с помощью которых можно прошить приемник через аппаратуру Taranis, через USB-стик или с помощью специального кабеля.
В случае с XMPF3E, получается не совсем логично, но аналогично  — у Вас есть SBUS (SBUS, +5, G), место под пины на плате с помощью которых можно прошить приемник как и через SPort (с помощью Taranis, USB-стика или специального кабеля). Да-да, SBUS, в этом случае, будет работать как SPort для прошивки.
— у Вас есть SBUS (SBUS, +5, G), место под пины на плате с помощью которых можно прошить приемник как и через SPort (с помощью Taranis, USB-стика или специального кабеля). Да-да, SBUS, в этом случае, будет работать как SPort для прошивки.
Предупреждение: прошивки от отдельностоящих приемников XR+ и XSR не подходят к таковым, впаянным на платы XSRF3E и XMPF3E. Для встроенных приемников будут отдельные прошивки на сайте FrSKY.

Мой текущий сетап:

Рама: KDS Kylin 210
Камера: Foxeer 700TVL
Передатчик: 5.8ГГц DalRC 600мВт
Антенна: клевер, Aomway
Мозг: FrSky XSRF3E (F3Evo cо встроенным приемником XSR)
Раздатка: FlyMod.net BEC/ZMR
Моторы: KDS Kylin 2204 2300kv
ESC: KDS Kylin 20A OneShot125
LiPO: FlyMod.net 1,300mAh, 4S, 45-90C
Props: 5x4x3
Вес всего сетапа (вместе с ремнем) без аккума: 300гр
Да, силиконовые резинки под крепление полетника нужны.Но с ними все нормально. Никаких жестоких вибраций и перевозбуждений. Летает плавно.
Заключение:
Оба полетника имеют стандартные разъемы под антенны. Даже если антенны умрут, их можно будет сменить. Оба имеют одинаковые физические и установочные размеры. То есть, единственно решение которое нужно сделать Вам: телеметрия с OTA PID или Blackbox.
Преимущества и недостатки XMPF3E и XSRF3E перед SpRacing F3Evo?
Преимущества:
- встроенный 16CH SBUS XM+ или XSR приемник
- малый вес
- простота установки
- RSSI на CH8
- 16CH SBUS отдельный выход у XM+
- SPort отдельный выход у XSR
- можно использовать еще и внешние приемники вместо встроенных
- конкурентная цена
Недостатки:
- UART2 занят приемником с случае XM+
- UART2 и UART3 заняты приемником с случае XSR
- 6PWM выходов с платы вместо 8PWM
- Нет I2C шины для подключения дисплея и датчиков
Преимущества и недостатки XMPF3E перед XSRF3E?
Преимущества:
- microSD card слот для записи blackbox data
- 16CH SBUS выход для внешних устройств
Недостатки:
- нет телеметрии
- нет настройки PID по воздуху
Преимущества и недостатки XSRF3E перед XMPF3E?
Преимущества:
- телеметрия через/от UART3 F3Evo на аппаратуру
- SPort выход для внешних устройств
- OTA PID настройки
Недостатки:
- нет blackbox
Пока все. Думайте и принимайте решение!!
Вы можете купить FrSKY XMPF3E здесь
Вы можете купить FrSKY XSRF3E здесь
Вы можете купить отличную раму KDS Kylin 210 здесь
Stay tuned, more to come…


