

Hobbywing XRotor 2205/2300kv + XRotor Micro BLHeli_s 30A DShot600. Pefect match review and DShot tuning guide

Hobbywing — a well known name in the R|C hobby for a long time — not only for perfect Platinum ESC series for helicopters and numerous auto R|C power products but also for the recent series of modern ESCs and motors for popular FPV racing quads. We are especially pleased with the fact that such respected company has joined the emerging quad electonics market and keeps it technologies up to date. We would rather vote for HobbyWing instead of trying to distinguish bad from good among many products and one-day companies that saturated this market.
Today, we would like to review two latest FPV quad products that make a perfect match if used together — Hobbywing XRotor 2205/2300kv motors and XRotor Micro BLHeli_s DShot600 ESCs. Moreover, we would go over the process of tuning those ESCs and explain what is DShot and how to deal with it. Kind of a guide for those who would like to try but is not familiar with DShot yet.
Let’s start with the motors:

Hobbywing XRotor 2205/2300kv Tech Specs:
Full specs in the MANUAL



These are really beautifully crafted motors. With great attention paid to details and high quality materials used. As seens from the pictures, almost every design element serves some technical role. Not only the motor iteslf makes an impression, but everything starts even with the box — small, neat and informative. There is even anti-counterfeit codes to make sure that you get the genuine product.

Box contents are:
- Motor (CW or CCW)
- Self locking nut to hold the prop
- 4 x M3 short screws (for the thinner type of frames)
- 4 x M3 long screws (for thicker type of frames, 4-5mm frames — ok)
Motor performance:
HobbyWing shows the following performance graph for this motor:

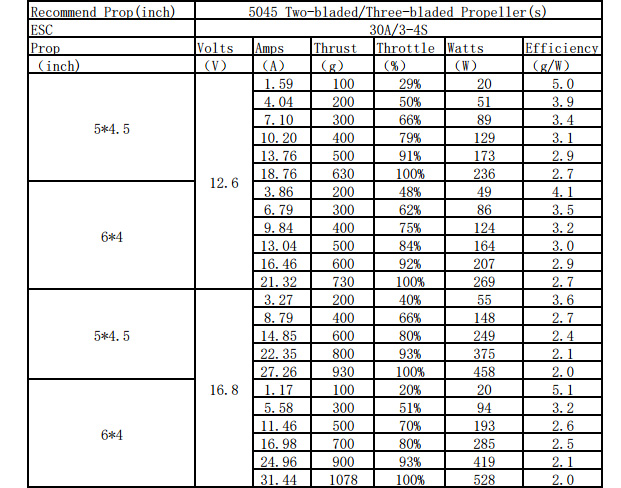
Unfrotunately, we don’t have our own thrust stand to check those figures… We can only compare different motors in real flight conditions or|and try to locate the necessary tests on the web. That is what we’ve found so far:

Full results file: HERE
Very interesting results that definitely shows that Hobbywing XRotor 2205/2300kv are one of the best 2205/2300kv motors currently available on the market. Our opinion is the same — we have tried and found that those are making impression and looks to be the best we’ve flown so far. Smooth, powerful, quick and staying cooler than many others. What really impressed us is that they are only 5g heavier than our favorite Kylin 2204/2300kv motors that look much smaller and fragile. Only 20g added to our flight setup after changing all 4 motors from 2204 to 2205 but the power output has noticeably increased. Max. throttle input now results in faster climbs and more speed. But the battery drains a bit faster as well…

We wouldn’t say that such powerful motors should be the only choice. Some entry pilots might prefer to use 2204 motors in favor of a bit longer flight times with less speed but with more manuevrability. But those who compete on racing quad arenas would definitely need something like these motors to have the most out of their setups.
By the way, HobbyWing has other 2 options for XRotor motors: 1800 and 2600kv. Check the series details HERE.
Manual and test parameters for 2205/2300kv motor: HERE
You can buy Hobbywing XRotor 2205/2300kv worldwide: HERE
You can buy Hobbywing XRotor 2205/2300kv in Ukraine: HERE
Enough about the motor, let’s shift to the perfect driving match — XRotor Micro BLHeli_s DShot600 ESC.
Tech. Specs:
- Cont./Peak Current: 30A/40A
- Input Voltage: 2-4S LiPo
- BEC output: No
- Input Wires: Red-18AWG-100mm*1 / Black-18AWG-100mm*1
- Firmware: BLHeli-S A-H-50 16.5
- Modes: Oneshot125, Oneshot42, MultiShot, DShot150/300/600
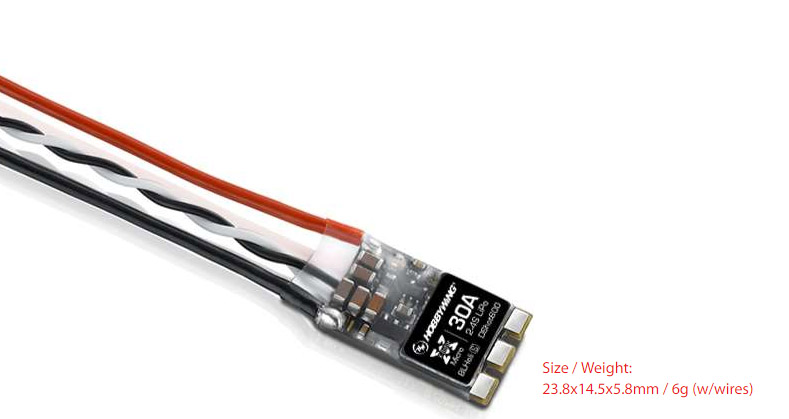
- Size: 23.8×14.5×5.8mm
- Weight: 6g

Features:
- Quality components: EMF8BB21F16G MCU (with the operating frequency of up to 48MHz), 3-in-1 drive IC, American Fairchild MOSFETs, quality ceramic capacitors, 3-ounce copper and 4 layers of PCBs guarantees less heat, higher efficiency and rapider response.
- The ESC supports the original BLHeli_S firmware. User can flash or upgrade the firmware via the signal cable (on ESC) and program 4 ESCs simultaneously after connecting their flight controller to the BLHeliSuite software (if the flight controller uses the CleanFlight or BetaFlight firmware).
- The ESC firmware uses hardware generated motor pwm for smooth throttle response and silent operation. Damped light does regenerative braking, causing very fast motor retardation, and it inherently also does active freewheeling.

Each ESC comes is a separate package that includes:
- ESC (power and signal/gnd twisted cable with servo connector soldered, ESC is wrapped with the heatsink and have moisture protection laquer and hot glue applied)
- Spare heatsink
- Manual
ESC package also has the countefeit product protection label.

So, what is so good about those ESCs? Of course — it is an ability to work in DShot 150,300 and 600 modes. Moreover, you wouldn’t even need to remove signal filtering capacitor to succesfully run DShot600 like you would do in many other DShot600 compatible ESCs.
You can buy XRotor Micro BLHeli_s DShot600 ESCs worldwide: HERE
You can buy XRotor Micro BLHeli_s DShot600 ESCs in Ukraine: HERE
From this point, let us start the short guide to DShot and show how to deal with it:
DShot — is a new way of communication between flight controllers and ESCs. It is not only an improvement over the very familiar OneShot125, OneShot42 (or even a MultiShot) but it is rather a very new way of communication because DShot represents a digital protocol, not analog. It still uses PWM signal but the peaks of the signal are used to indicate «0» and «1». Why is it better over regular PWM that sends electric pulses to ESCs to determain power? Because DShot is:
- Not succeptible to jitter and noise
- Doesn’t require ESC calibration due to the absence of the oscillator drift
- It has high resolution of 2048 steps
- It has CRC in the signal and every signal is proven to be correct
- It virtually capable of >30kHz loop times
- It is more precise that «analog» type signal
Looks promissing!
Do not be afraid of DShot. It just looks complicated but in fact it is easier to setup and work with than the regular ESCs.
My example of working with DShot ESCs would be based on described above motors, ESCs and SpRacing F3Arco and F3Evo boards (in my case FrSKY XSRF3E but any other F3 would do).
XSRF3E wiring diagram:
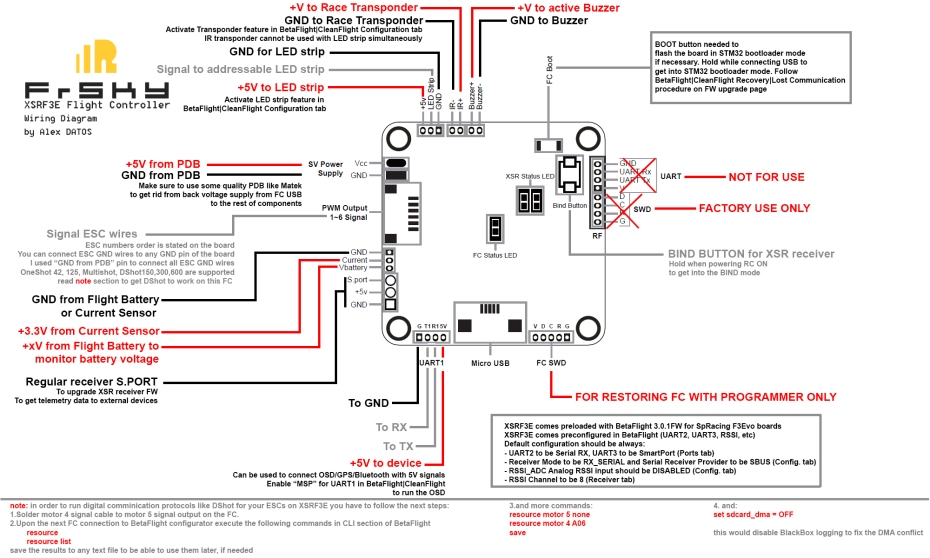
In case of F3Arco — it is very simple and straight forward. In case of F3Evo it is a bit more complicated — read the *note section to get F3Evo DShot compatible. And I also assume that you use BetaFlight FW on your FC.
*note: in case if you are using F3Evo board — solder motor 4 signal cable to motor 5 signal output on the FC. Upon the next FC connection to BetaFlight configurator do the following: in CLI type the next commands:
resource resource list
save the results to any text file to be able to use them later, if needed
and more commands:
resource motor 5 noneresource motor 4 A06save
this would move MOTOR 4 to new pin assignment to fix DMA conflict with motor outputs 2 and 4.
and:
set sdcard_dma = OFF
this would disable BlackBox logging to fix the DMA conflict
So, the first thing to know is that most of not all of the FCs with BetaFlight would let you setup BLHeli ESCs using a passthrough method. Just solder ESCs, motors and everything like you always done before and with the props off prepare the following:
- From Google Chrome store download BLHeli applet for Chrome.
- Remove your props, power your quad, connect FC to the BetaFlight Configurator and make sure that you have OneShot125 or 42 selected for now.
- Disconnect from BetaFlight and connect to BLHeli configurator

Configurator would discover your ESCs and there would be a button at bottom right to read the configuration from ESCs. Hit that.

One the next screen you would see some default parameters along with the option to select and upgrade the FW. Notice that this applet shows some common parameters sections and each separate ESC additional parameters. Moreover, it would also tell you which FW version you currently have on each of your ESCa and let you choose from the drop down menu the appropriate newer|older ones. Decide whether you want to upgrade. I did it, flawlessly.
The rest of the parameters are:
Common parameters:
- Prgramming by TX: common sense — whether you want to use programming mode from TX or not. Leave it default.
- Start up power: the power with which the motor would start to spin. Usually should be left at default 0.50
- Temperature protection: common sense. I set it to 80C.
- Low RPM power protection: protection form overpowering the motors at low RPM — set YES.
- Brake on stop: leave it as NO. We don’t need braking.
- Demag Compensation: protection from motor stalls caused by long winding demagnetization time after commutation. Leave it default.
- Motor Timing: common sense. Most of the motors would run with Medium (default) settings.
- Beep strength: common sense
- Beacon strength: the strength of beeps for motors when Thr is idle too long. Don’t set it high or it can burn your motors. Default value is ok.
- Beacon Delay: time perior of Thr inactivity after which beacon beeps would be sounded.
Individual parameters:
- Motor direction: the direction of motor rotation. Set this appropriately to the direction you need. You can check motor rotation direction when connected to BetaFlight configurator and using Motor tab. You might have to return here again to change the direction.
- PPM mix. throttle: for DShot set it to be 1000 (*note)
- PPM max. throttle: for DShot set it to be 2000 (*note)
- Flash FW: look at the top bar of each ESC — it syas which version and which FW is currently on your ESCs. Check for the newer FW versions in the drop down menu. Flash if necessary.
You can also check the default parameters in the ESC manual: HERE
Just hit «Write Setup» and you are done.
*note: Since DShot doesn’t require to calibrate Thr signal for ESCs, Min and Max Thr values should be set to the stated limits of 1000 to 2000. The digital signal is passed within those boudaries, therefore, it should be like this for any DShot ESC.
Now, as you are done with ESCs setup, you can connect to BetaFlight configurator, select DShot 150, 300 or even 600 on the Configuration tab.
The last thing to do is to set the idle Thr % for the motors and ESCs (you can see such parameter in the Configuration tab below DShot protocol selected).
This is also easy:
- go to Motors tab
- check «I uderstand the risk……..» warning at the bottom right
- connect your flight battery if it is not yet connected (better to use some current limiter, but I don’t use it)
- click on Master slider and with your keyboard UP button (one press at a time) start to increase Thr%.
- when the motors would start to spin normally (no stall noise, no clicks, just a smooth run) — write down the resulting value. Let’s assume that you’ve got 1050.
- Subtract 1000 and divide by 10. 1050 — 1000 = 50/10 = 5
- You can now enter this number as the idle Thr% in the Configuration tab.
That is it. Your motors and ESCs are now ready to go.
Original DShot document on Github: HERE
Important: one of the main question about DShot and reason to have those on your quad is the loop time: what loop time DShot can handle and how it correlates with the gyro and PID loop times on your FC board. As you probably know, the rule to set max Gyro loop and PID loop frequency in Configuration tab is CPU load of the FC (shown at the very bottom of the applet). CPU load should not exceed 30% after making the change. F3Evo boards would allow up to 8 / 8kHz to run but it depends of the features enabled on the board (acceleromter, barometer, etc). Since one of my flight modes (Horizon) requires accelerometer to run, I can go as high as 8 (gyro) / 4 (PID loop — that is what ESCs would use) kHz loop time and get 27% CPU load. Now, let’s see what DShot is capable of:
- DSHOT150: 4kHz max
- DSHOT300: 10,6kHz max (10,6khz is only available on 32khz gyro boards)
- DSHOT600: 16kHz max
- DSHOT1200: >32khz max
So, in my case DShot300 is the right choice. Why? Because DShot150 would reach the limit (it is always bad not to leave some room) and DShot600 would be a huge excess that would drive DShot600 ESCs to the max amount of signals despite the FC board is incompatibe of running such speeds (FC PID loop is 4kHz, DSho600 loop is 16kHz ). Therefore, DShot300 is a good choice.
That is it.
We hope that this review and small guide helped you to understand what is so good about recent DShot protocols and such products as HobbyWing XRotor series ESCs and motors that are capable to run it smoothly. Have it, set it, fly it. And you would notice the positive difference right away.
Our setup:
- KDS Kylin 210 frame
- Hobbywing XRotor 2205/2300kv motors
- XRotor Micro BLHeli_s DShot600 ESCs
- FrSKY XSRF3E (F3Evo board with integrated XSR RX), BetaFlight
- Matek PDB
- Foxeer 700TVL CMOS FPV cam
- DalRC 5,8Ghz 600mW VTX
- Aomway 5.8Ghz cloverleaf antenna
- Some addressable LED strip
- KingKong 5045-V2 3blade props
- 1,300mAh Bonka 45-90C 4S




Original DShot document on Github: HERE
You can buy Hobbywing XRotor 2205/2300kv worldwide: HERE
You can buy XRotor Micro BLHeli_s DShot600 ESCs worldwide: HERE
You can buy Hobbywing XRotor 2205/2300kv in Ukraine: HERE
You can buy XRotor Micro BLHeli_s DShot600 ESCs in Ukraine: HERE
![]()


